
Vishwesh Vhavle
I am Vishwesh Vhavle, a Research Fellow at 3DVisLab, IIT Jodhpur, where I specialize in human head modeling and point cloud processing under the guidance of Prof. Avinash Sharma. Previously, I worked as a Research Intern on the Driver Monitoring Systems team at Mercedes-Benz Research. Before that, I earned my Bachelor's degree in Computer Science Engineering from IIIT Delhi, where my thesis focused on autonomous mobile robotics. I work at the intersection of 3D Computer Vision, Robotics, and Computer Graphics. I am interested in leveraging their interplay, along with representation learning, to advance methodologies across these domains.
Publications
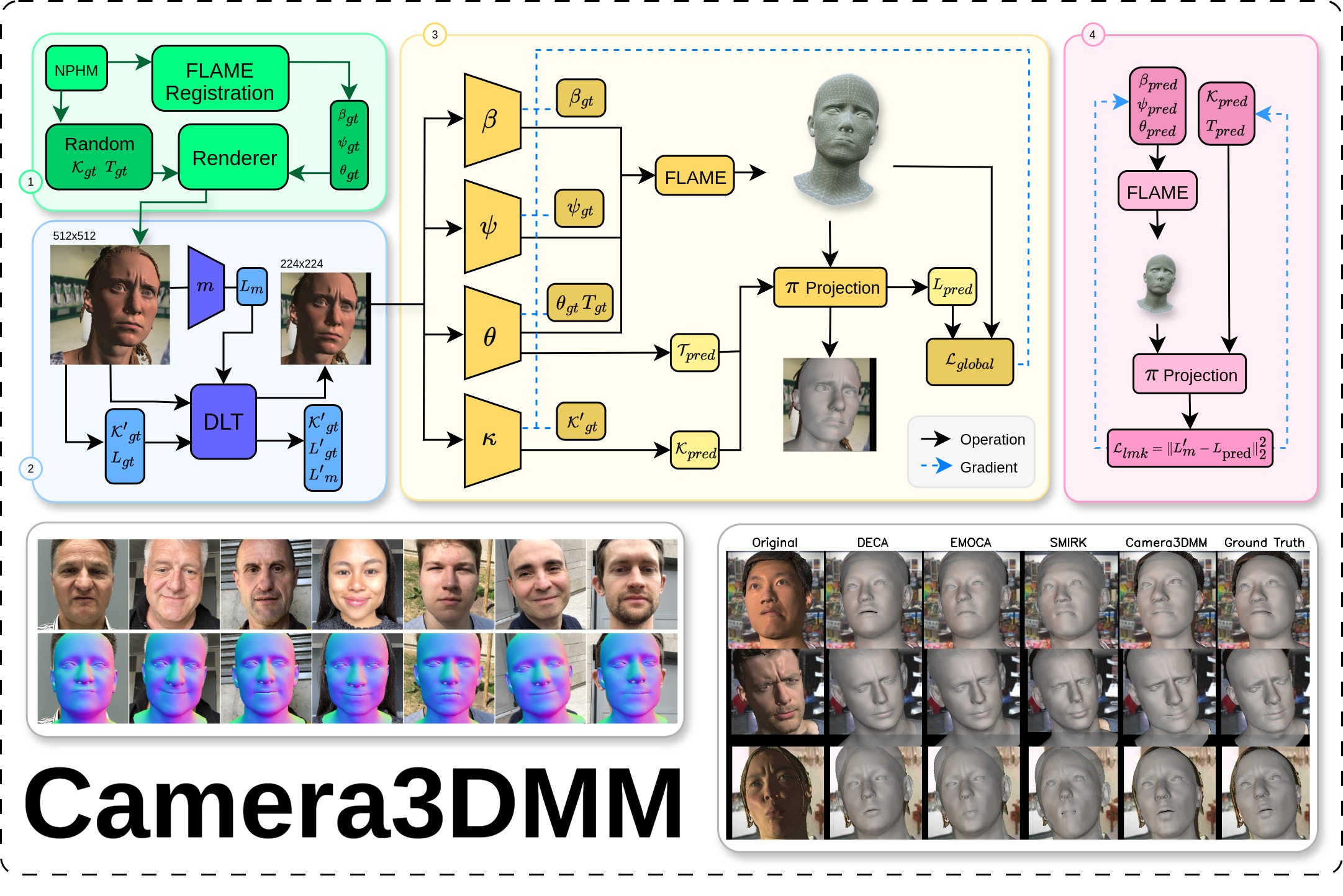
Camera3DMM: Leveraging Perspective Camera for Estimating Parametric 3D Head Models
Vishwesh Vhavle, Hiteshi Jain, and Avinash Sharma
SIGGRAPH Asia Technical Communications, 2025

Alfred: Open-Source Autonomous Mobile Robot Platform with Augmented Physical Testbed
Vishwesh Vhavle* and Jatin Sharma*
I-SMAC, 2024
Experience
Research Fellow
3DVisLab, Indian Institute of Technology, Jodhpur
- Developing learning frameworks for arbitrary mesh triangulations for local-global geometric processing
- Working on improving human head mesh registration, detail-preserving deformations, and local template-based editing through surface geometry learning
- Applying discretization-agnostic frameworks to FMCW LiDAR data with doppler velocity information
3D Computer Vision Research Intern
Mercedes-Benz Research & Development, India
- Developed a synthetic data generation pipeline to generate photorealistic images using morphable face avatars textured with 3D Gaussian Splatting for pre-training foundation models for driver monitoring systems
- Worked on Parametric Human Head Reconstruction from commodity monocular images with extreme camera distortions (Patent Filed and Technical Communications Paper Accepted at SIGGRAPH Asia 2025)
Robotics Research Assistant
Infosys Centre for Artificial Intelligence, IIIT Delhi
- Developed an Open-Source Autonomous Mobile Robot (AMR) platform including the firmware, control system, perception, SLAM, navigation, and path-planner
- Designed a motion-capture facility for comprehensive AMR testing and Sim-to-Real transfer of Deep-RL policies trained using ROS and Gazebo framework
- Developed a framework for data-driven Trajectory Prediction of traffic agents using PyTorch, and deployed it on the autonomous vehicle project at IIIT Delhi
Projects
Alfred: Autonomous Mobile Robot
Open-source UGV platform with Velodyne VLP-16 LiDAR, NVIDIA AGX Orin for advanced robotics research.
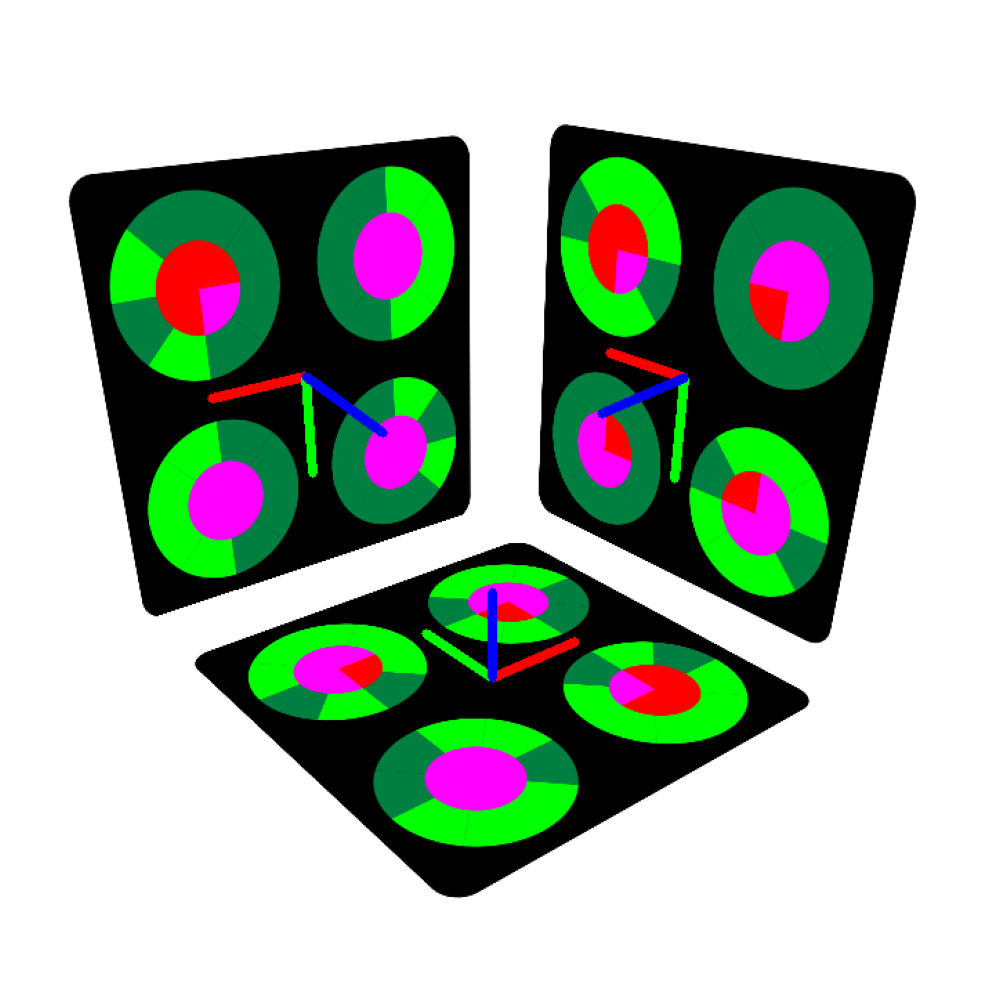
UGV Test-Bed Facility
200 sqm facility with real-time tracking achieving <2cm error for Sim-to-Real policy transfer.
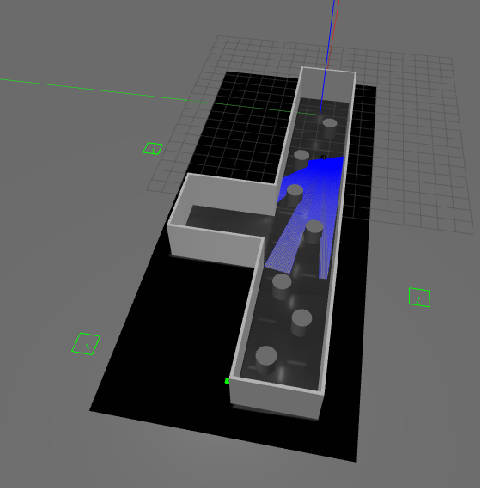
Deep RL Navigation
TD3 policy gradient algorithm for autonomous navigation with Turtlebot 3 and VLP-16 LiDAR.
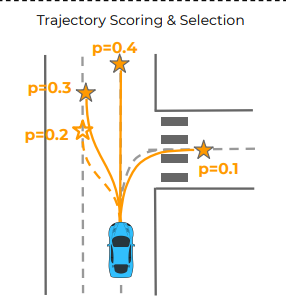
Motion Prediction
Data-driven trajectory prediction framework for traffic agents using PyTorch.

Solid Texture Synthesis
Non-parametric texture optimization with histogram matching and OpenGL rendering.
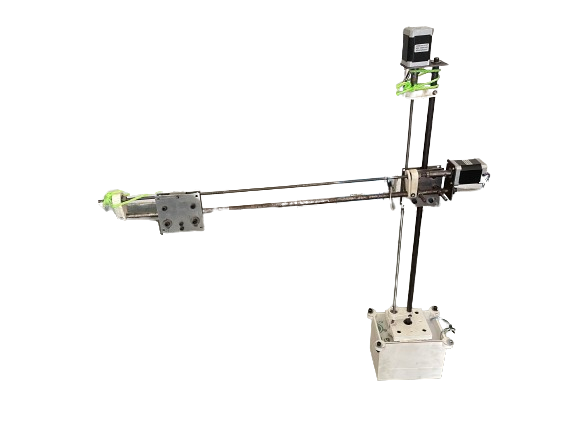
Cylindrical Manipulator
3-DOF robotic manipulator with hand-eye coordination for package sorting.
Awards & Achievements
-
2025
First Runners-Up of the 3D Gaussian Splatting Challenge
3DGS Workshop, SIGGRAPH Asia 2025
-
2024
Best BTP in Engineering Track
Bachelor Thesis Project, Class of 2024, IIIT Delhi
-
2023
Top-Up Fellowship
ARTPARK IISc Bangalore
-
2023
Summer Undergraduate Research Fellowship
IIIT Delhi
-
2022
Nidhi-Prayas Seed Funding
₹7,00,000 from Government of India
-
2021
Finalist at Flipkart's GRiD 3.0
Robotics Competition
-
2021
50% Merit Scholarship
IIIT Delhi